
5.4 Decomposition Links
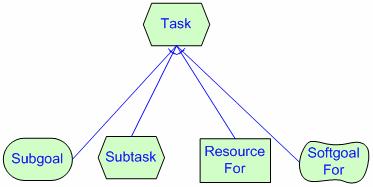
A task element is linked to its component nodes by decomposition links. A task can be decomposed into four types of elements: a subgoal, a subtask, a resource, and/or a softgoal - corresponding to the four types of elements. The task can be decomposed into one to many of these elements. These elements can also be part of dependency links in Strategic Dependency model(s) when the reasoning goes beyond an actor's boundary.- Task-Goal Decomposition: Subgoal. In this kind of decomposition it is not specified how the goal is to be achieved, allowing alternatives to be considered.
- Task-Task Decomposition: subtask. When a task is specified as a subcomponent of a (higher) task, this restricts the higher task to that particular course of action.
- Task-Resource Decomposition: resourceFor: The entity represented by the resource is not considered problematic by the actor. The main concern is whether it is available (and from whom, if it is an external dependency).
- Task SoftGoal Decomposition: softgoalFor: When a softgoal is a component in a task decomposition, it serves as a quality goal for that task, and thus guides (or restricts) the selection among alternatives in further decomposition of that and other tasks.
Open Version
For questions regarding i* syntax please click on the "discuss" tab. This feature is available for registered users only. For registration information please see the Registration and User Rights Policy for the i* Wiki.